Paper accepted to SG2RL at the International Conference on Computer Vision (ICCV 2025)
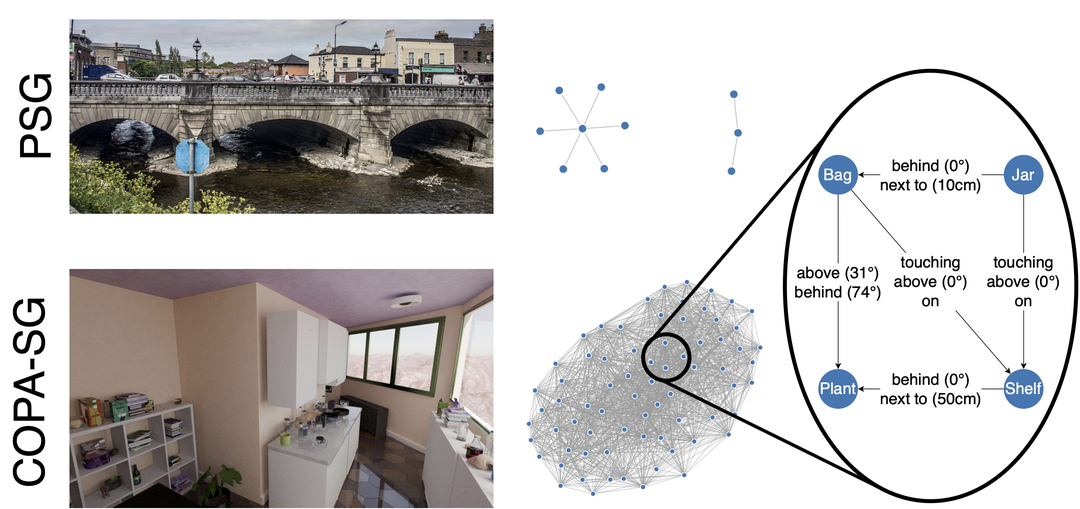
Our paper "CoPa-SG: Dense Scene Graphs with Parametric and Proto-Relations" by Julian Lorenz, Mrunmai Phatak, Robin Schön, Katja Ludwig, Nico Hörmann, Annemarie Friedrich, and Rainer Lienhart has been accepted to the 3rd Workshop on Scene Graphs and Graph Representation Learning (SG2RL) at the International Conference on Computer Vision 2025. This publication presents a new, procedurally generated dataset that is designed to address the weaknesses of existing scene graph datasets. The new dataset, named CoPa-SG, contains highly precise information about how different objects in an environment relate to each other. This information can be learned by a neural network, enabling the development of complex AI-powered applications that interact with the real world.